Mission
Project Name: Applying Navigation System on our Zetabot
- This mission is a group project.
- Construct a map within your team.
- Navigate the contructed map with the Zetabot as a team.
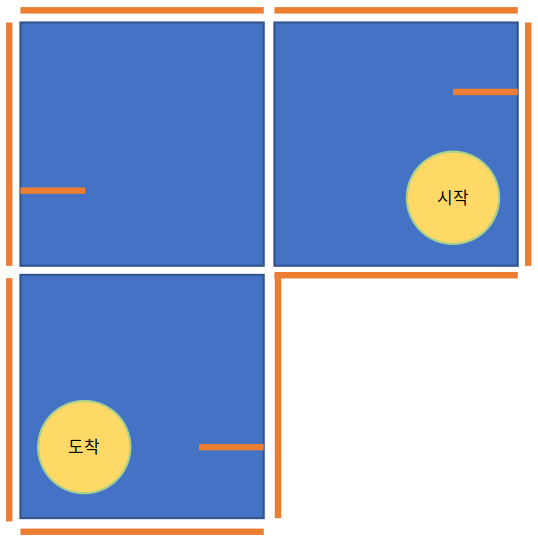
For each team, 3 map panels will be given.
As a team try to arrange the panels so that there is a clear starting and finishing zone. For example:
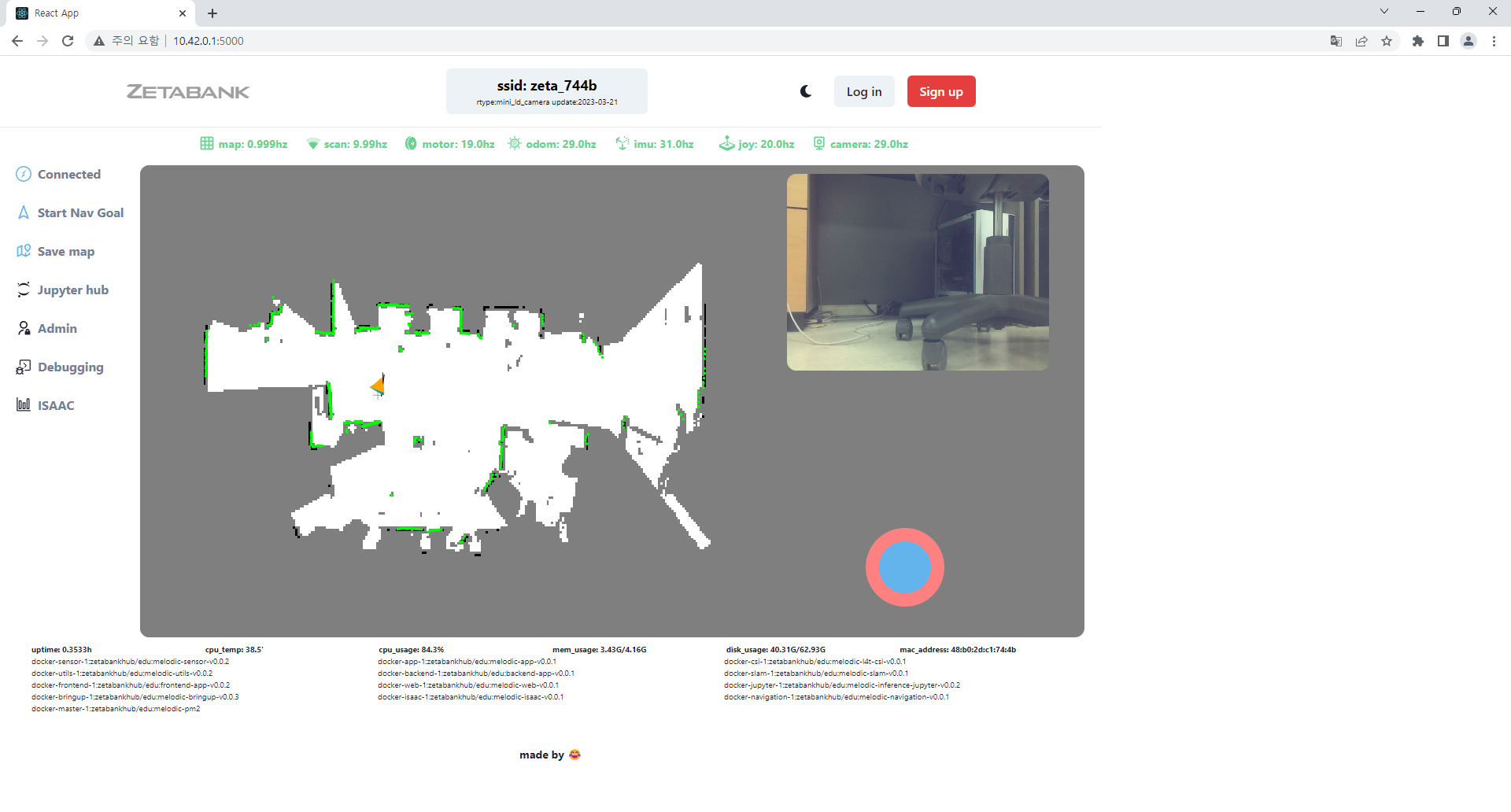
This will start the mapping simulation. Using SLAM method, the robot will utilize its LIDAR sensors as well as multiple odometry sensors to map out its immediate surroundings.
By using the controller, move the Zetabot around the constructed map to learn its surroundings.
Click on
Start Nav Goaland click the desired location and drag the curser to set which direction the robot should face once it reaches the said location.
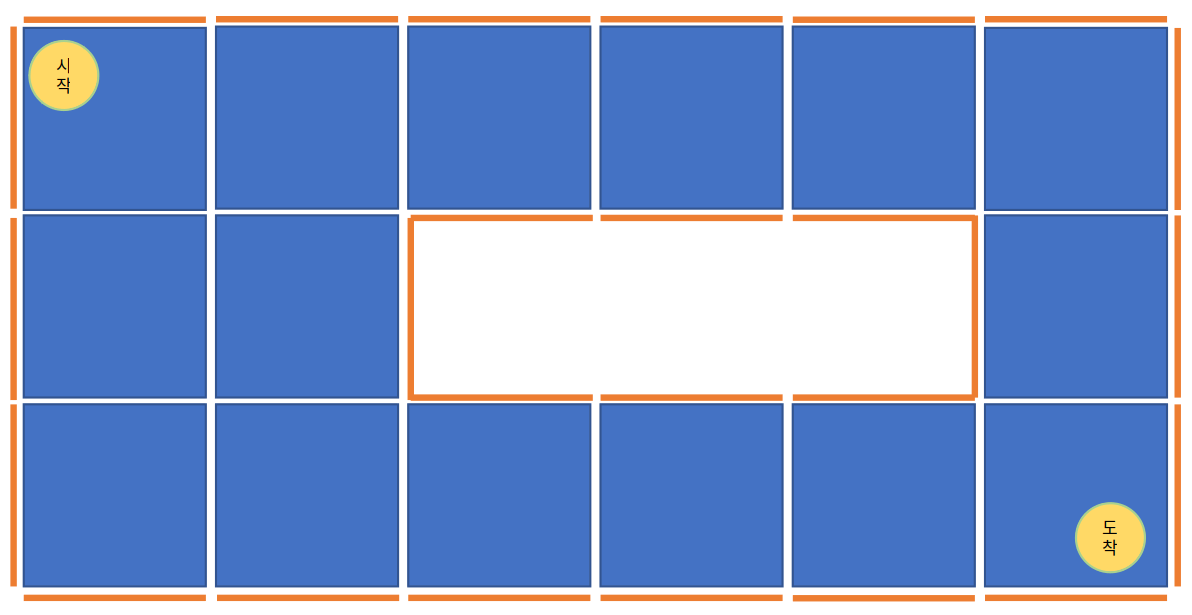
With other team members, construct a large map with starting and finishing position. Example:
Team by team, execute the navigation task with your Zetabot.
Constructing a Map (as a Team)
For our navigation mission, we we hold a cooperative mission with other teams.
Mapping the Constructed Map
Place the Zetabot on the starting location of the map.
You can see the following screen by opening your web browser and accessing 10.42.0.1:5000:

Mapping
Executing Navigation
Place the Zetabot in the starting position.